Haptic Strength Coach
Built and tested a wrist-mounted haptic wearable achieving 100% rep tempo compliance across all 10 participants in a live gym study.
Overview
Controlled rep tempo is essential to strength training performance, yet most athletes rely entirely on memory with no real-time guidance. Camera and screen-based systems are impractical in live gym environments, as they demand attention and create safety risks. This capstone addressed that gap with a self-contained wrist-mounted haptic device paired with a post-workout visualization study, validated across two phases with 10 intermediate-to-advanced athletes in a real gym setting.
The Challenge
How might we provide comprehensible, non-intrusive haptic feedback to strength athletes during lifts, and translate their rep data into meaningful post-workout insights?
Process
Reviewed HCI literature on wearable sports feedback, haptic signal design, and personal informatics visualization. Identified the core gap: no low-cost, screen-free pacing solution validated in ecological gym conditions.
Established two research questions: R1, can haptic cues produce comprehensible pacing feedback during lifts? R2, how should rep accuracy data be visualized post-workout? Each drove a separate study phase.
Built a wrist-mounted Arduino Uno R3 prototype with Grove vibration motors and a 3D-printed casing. Mapped the 3-1-X-1 bench press tempo to four vibration phases. Designed three competing Figma visualization prototypes: Hybrid, Qualitative, and Quantitative.
Ran a two-phase study with N=10 intermediate/advanced lifters. Phase 1 tested the haptic prototype during live bench press sets. Phase 2 evaluated all three Figma prototypes on mobile, using thematic analysis with axial coding across both phases.
Outcomes
Design
Wearable Prototype
The device was fully self-contained and battery-powered, with no external computer or camera required during lifts. Built with an Arduino Uno R3, Grove Base Shield, dual vibration motors, a 3-axis accelerometer, and a 3D-printed casing with a velcro strap. Firmware used millis()-based non-blocking delays to ensure precise vibration timing without interrupting sensor reads.
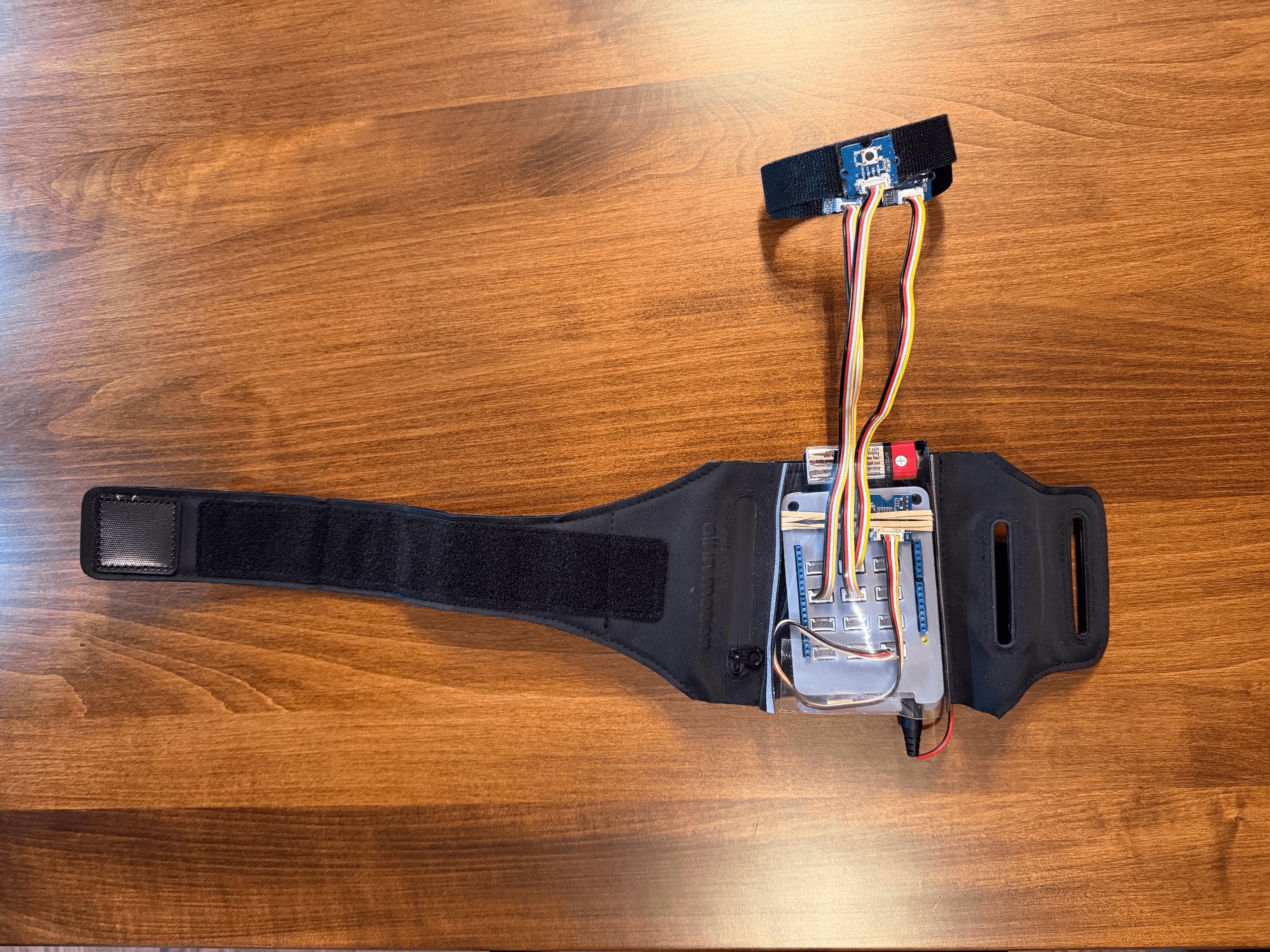
Haptic Pattern Design
The 3-1-X-1 tempo notation (3s eccentric, 1s bottom pause, explosive concentric, 1s top pause) was mapped to distinct vibration patterns for each phase. The eccentric phase used 3 pulses at 1/second, the clearest signal window. The concentric phase was silent, relying on the accelerometer to detect upward movement. All 10 participants interpreted the vibration pattern correctly within 1–2 sets.

Post-Workout Visualization Prototypes
Three Figma prototypes explored how rep tempo data should be presented post-set. All three used the same simulated rep tempo dataset to ensure fair, consistent comparisons across all 10 participants.
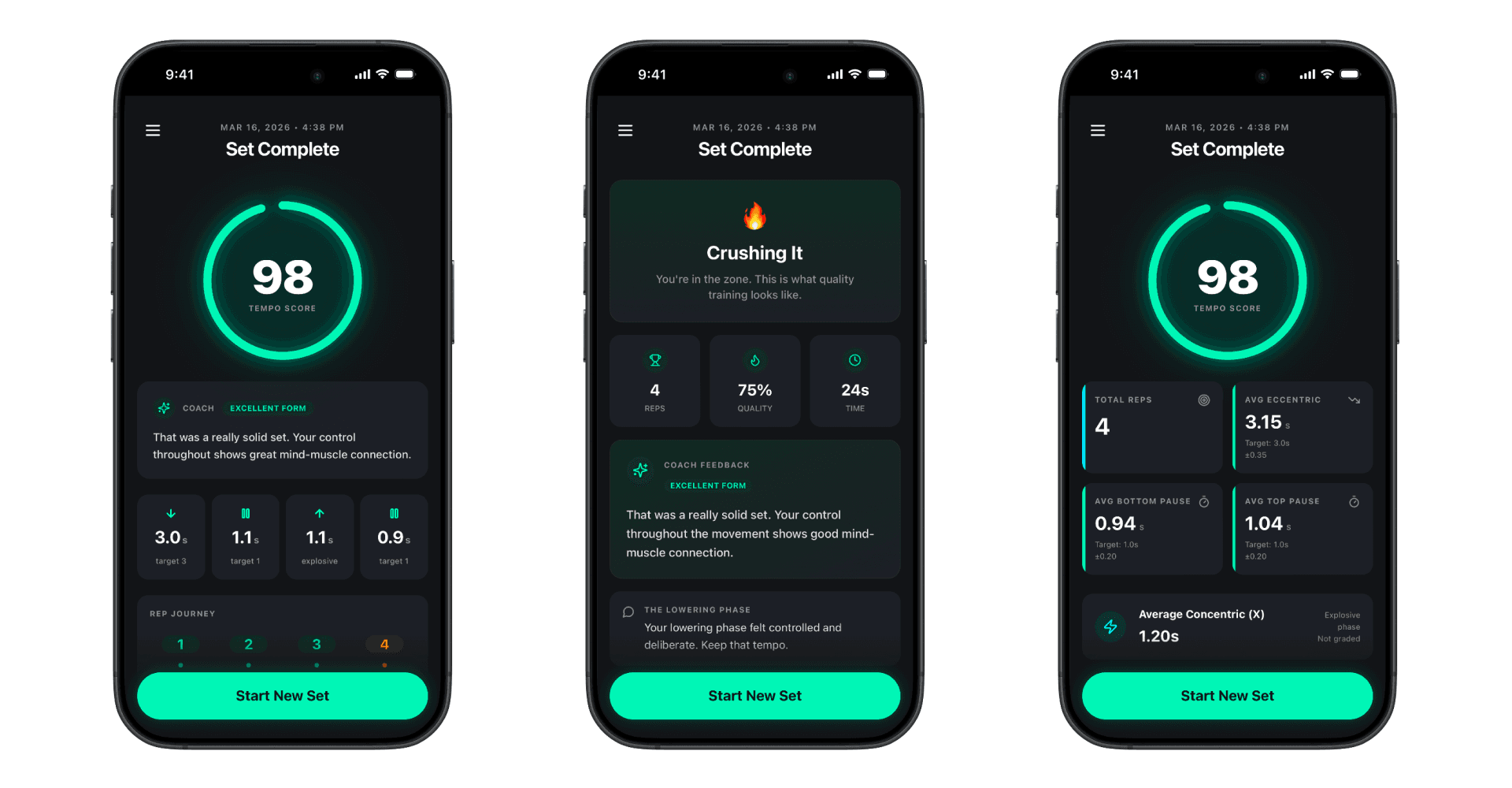
Hybrid Prototype
Combines a circular tempo score with an AI coaching summary, phase averages, and a rep journey visualization. Blends precise numbers with narrative context, giving athletes both a quick glance score and the reasoning behind it.
Qualitative Prototype
Prioritizes narrative coaching feedback, rep highlights, and fatigue notation over raw data. Designed for athletes who prefer language and interpretation, this prototype focuses on what the numbers mean rather than the numbers themselves.
Quantitative Prototype
Full precision data for analytically-minded athletes. Presents per-rep timing charts, trend lines, and a rep-by-rep data table, giving athletes complete visibility into their performance without any narrative framing.
Study Findings
Thematic analysis across both phases produced five themes: signal clarity, behavioral effect, cognitive load, perceived support, and design iteration requirements. 10/10 participants achieved tempo compliance within two sets. No participant described the feedback as intrusive; the dominant characterization was 'supportive, like having a spotter.' For visualization, no single prototype dominated; a layered architecture (glanceable score → narrative coaching → optional rep-by-rep data) best accommodated the full range of athlete preferences.
Preferred Visualization Architecture
Layered depth, athlete's choice.
No single prototype won. Athletes needed different depths based on fatigue, goal, and preference — a layered system accommodates all three.
Key Learnings
Unlike camera or screen systems, haptic feedback doesn't occupy the visual or auditory channel. Participants noted it didn't compete with music or require them to look away. This is a fundamental advantage in live gym environments where distraction is a safety risk.
Athletes didn't uniformly prefer quantitative or qualitative post-workout feedback. Fatigue level, goals, and analytical orientation all shaped which prototype resonated. A layered architecture that lets users choose depth is more effective than optimizing for one profile.
A $40 Arduino setup proved viable in a real gym under real load conditions. Proving feasibility in the actual environment (not a lab) was the most important validation step, and it changed what design constraints actually mattered.